
About

I work on planning and controls for autonomous vehicles at WeRide.ai. Previously, I worked on motion planning for industrial robot arms at XYZ Robotics Inc.
I received the M.Eng. degree from Duke University, where I did research on motion planning and optimal control at the Intelligent Motion Laboratory. I received my B.Eng. degree from Wuhan University of Technology.
Email: me@weidongsun.com
[GitHub] [LinkedIn] [Google Scholar]
What I do
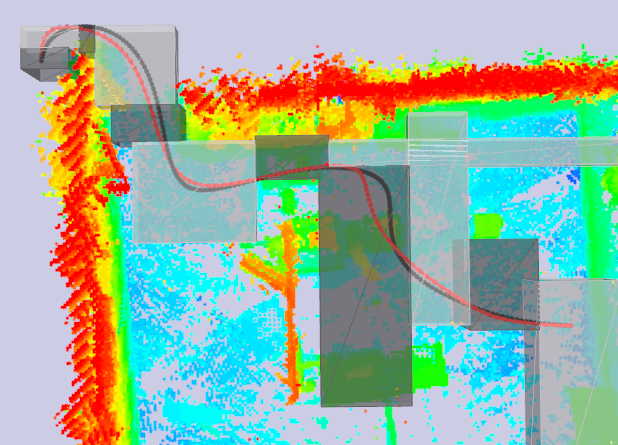
Motion Planning for Robot Arms:
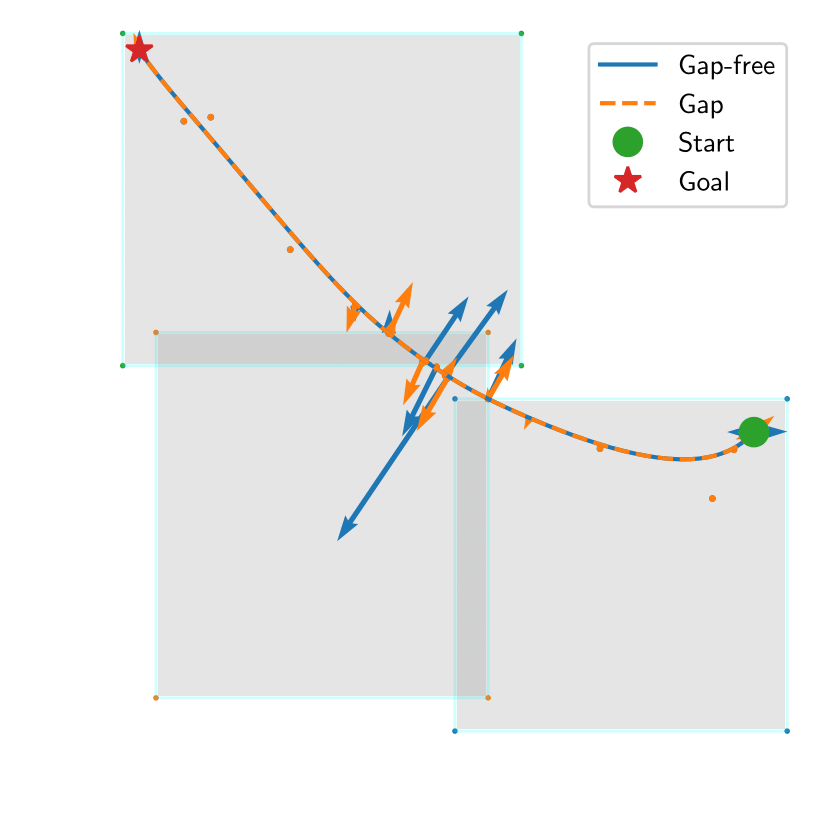
Without Cartesian constraint
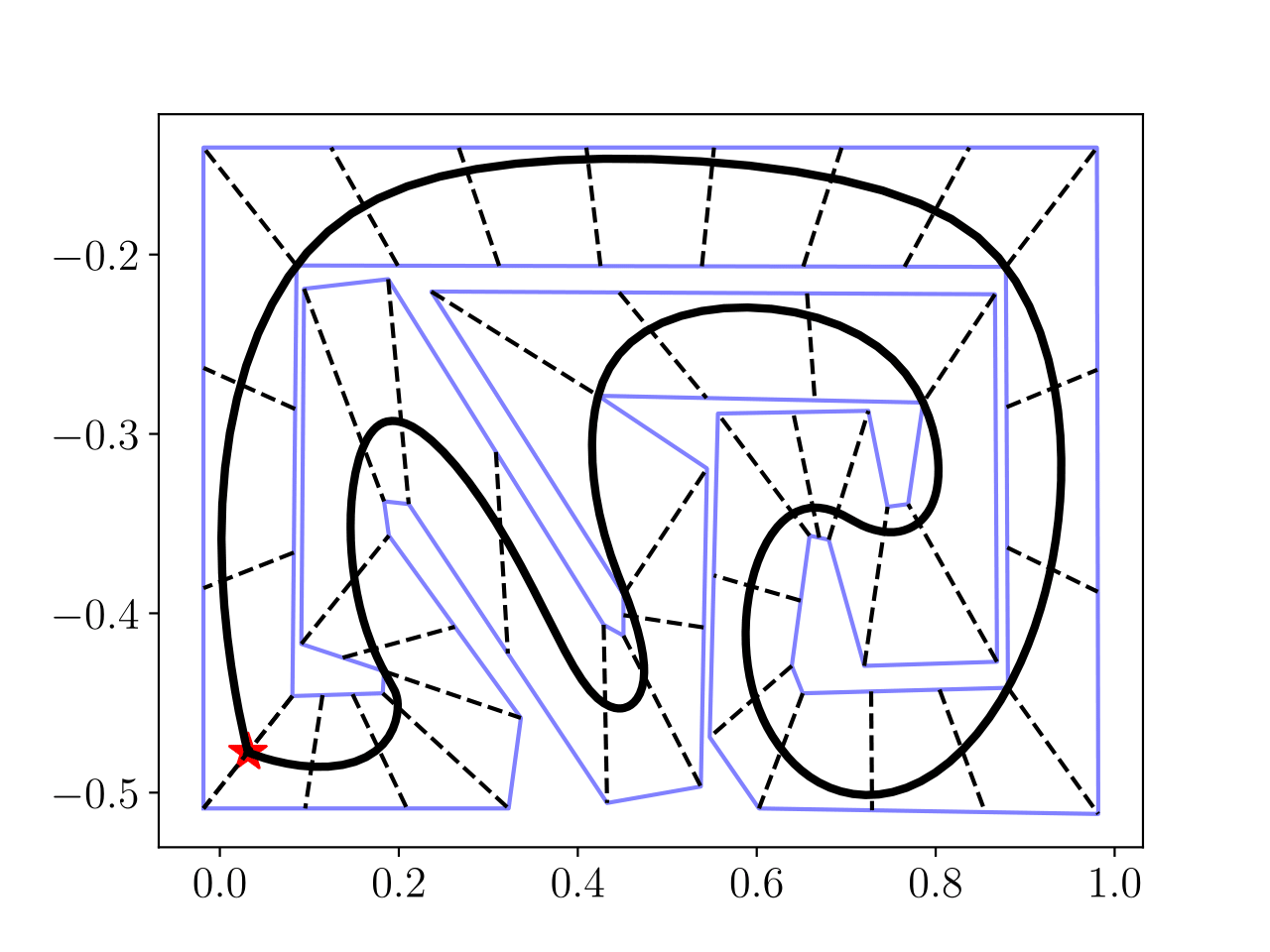
With Cartesian constraint
Publications
* Denotes equal contribution.
Journal & Conferences
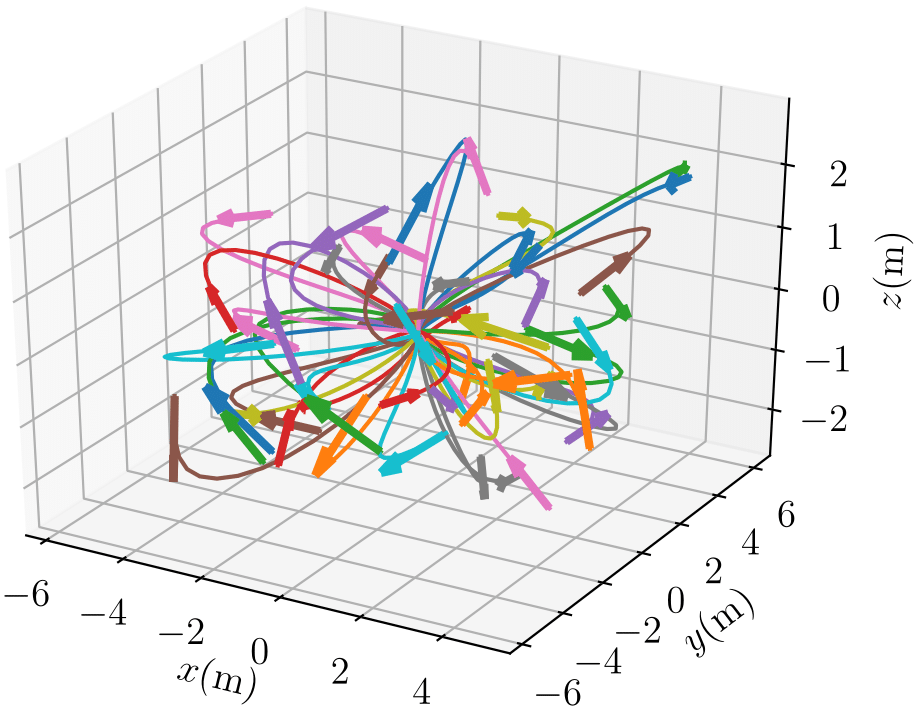
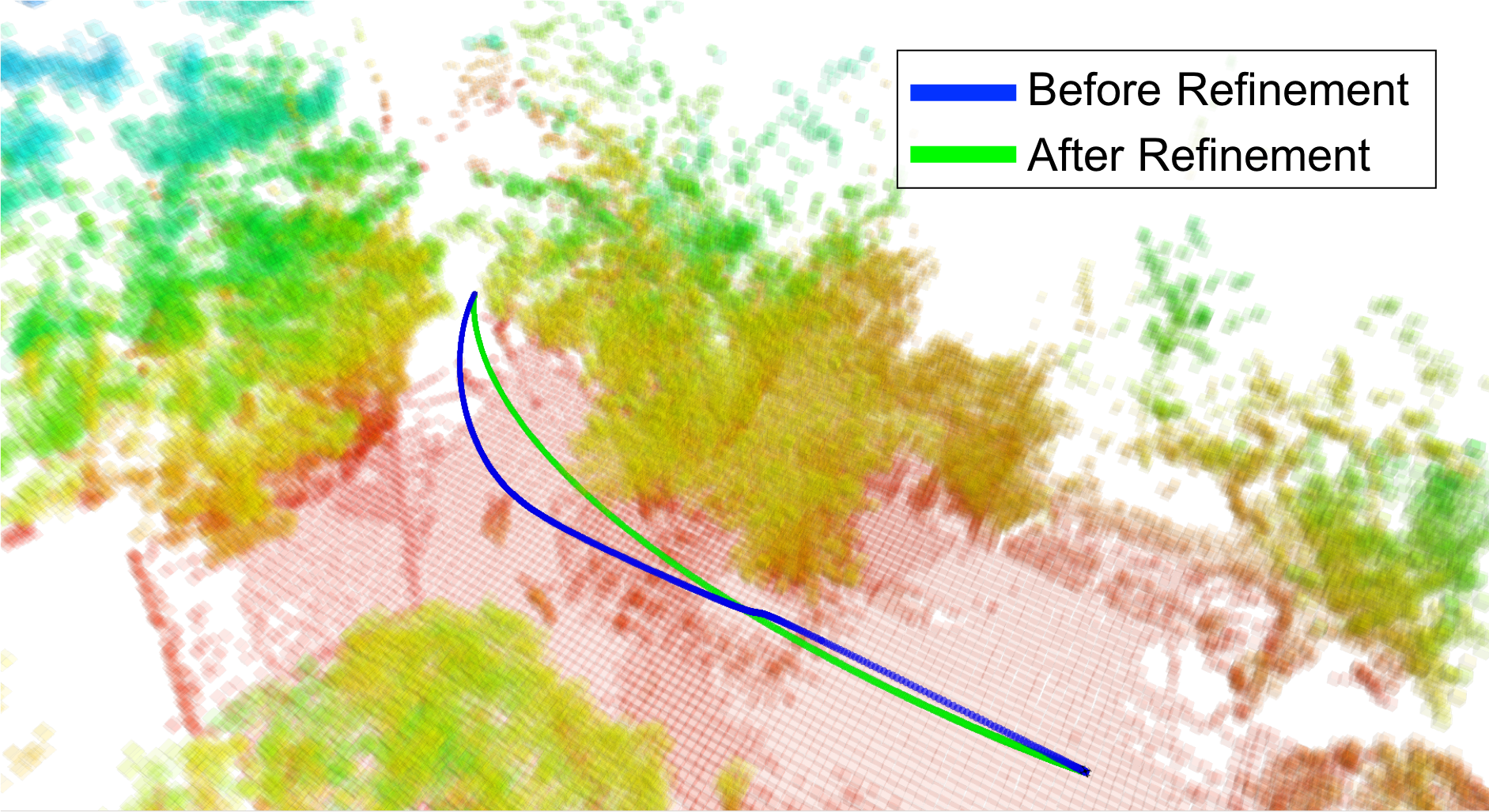
 Fast UAV Trajectory Optimization using Bilevel Optimization with Analytical Gradients
Fast UAV Trajectory Optimization using Bilevel Optimization with Analytical Gradients
Weidong Sun*, Gao Tang*, and Kris Hauser
IEEE Transactions on Robotics 2021
Winner of the Best Paper Award 2021 from
TC on Model-Based Optimization for Robotics
[IEEE]
[PDF]
[Code]
 Fast UAV Trajectory Optimization using Bilevel Optimization with Analytical Gradients
Fast UAV Trajectory Optimization using Bilevel Optimization with Analytical Gradients
Weidong Sun*, Gao Tang*, and Kris Hauser
ACC 2020
[IEEE]
[PDF]
[Code]
 Enhancing Bilevel Optimization for UAV Time-Optimal Trajectory using a Duality Gap Approach
Enhancing Bilevel Optimization for UAV Time-Optimal Trajectory using a Duality Gap Approach
Gao Tang, Weidong Sun, and Kris Hauser
ICRA 2020
[IEEE]
[PDF]
[Video]
 Time-Optimal Trajectory Generation for Dynamic Vehicles: A Bilevel Optimization Approach
Time-Optimal Trajectory Generation for Dynamic Vehicles: A Bilevel Optimization Approach
Gao Tang*, Weidong Sun*, and Kris Hauser
IROS 2019
[IEEE]
[PDF]
 Learning Trajectories for Real-Time Optimal Control of Quadrotors
Learning Trajectories for Real-Time Optimal Control of Quadrotors
Gao Tang, Weidong Sun, and Kris Hauser
IROS 2018
[PDF]
[Video]
[Slides]
Workshop and Posters
Time-Optimal Trajectory Generation for Dynamic Vehicles: A Bilevel Optimization Approach
Gao Tang*, Weidong Sun*, and Kris Hauser
Presentation, ICRA 2019 workshop on
Toward Online Optimal Control of Dynamic Robots
[PDF]
[Poster]
[Slides]
 Fast UAV Trajectory Generation Using Bilevel Optimization
Fast UAV Trajectory Generation Using Bilevel Optimization
Weidong Sun*, Gao Tang*, and Kris Hauser
Presentation, ICRA 2019 Workshop on
The Future of Aerial Robotics: Challenges and Opportunities
[PDF]
[Slides]
Contact
Email: weidong.sun@alumni.duke.edu